Modelo Presa-Depredador
Los modelos de depredación y competencia forman parte de la batería de herramientas clásicas del ecólogo. Vito Volterra en Italia y Alfred Lotka en Estados Unidos fueron los precursores en este tema y crearon los modelos que, con diversas modificaciones y mejoras, seguimos usando hoy. El modelo de Volterra para depredación comienza suponiendo la existencia de dos poblaciones de animales, una de las cuales (el depredador) se alimenta de la otra (la presa). Se supone que las dos poblaciones están formadas por individuos idénticos, mezclados en forma más o menos homogénea en el espacio (veremos que esta suposición es importante a la hora de modelizar la interacción entre ambas poblaciones). Cada una de las poblaciones, en ausencia de la otra, tiene una dinámica “malthusiana”, es decir, exponencial: si no hay depredador, la población de la presa crece exponencialmente; si no hay presa, la población del depredador decrece exponencialmente.
El sistema de ecuaciones del modelo Lotka-Volterra es el siguiente:
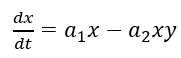
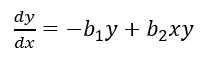
Donde:
a1 es la tasa de crecimiento.
a2 es el rango de ataque.
b1 representa el rango de hambruna.
b2 es la eficiencia de ataque.